
Dependiendo de las necesidades, y razones constructivas, los bobinados internos del motor pueden estar previamente conectados, dejando así en la bornera las puntas para que el técnico instalador realice las conexiones según el nivel de voltaje.
Antes de empezar esta parte es necesario aclarar el término de conexión en serie y paralelo, ya que es vital a la hora de realizar las conexiones de un motor.
CONEXIÓN SERIE
 Las bobinas en serie se conectan para el alto voltaje presente en la conexión, para ello se une un principio y un final de las bobinas, de esta manera se realiza la conexión en serie de bobinados de un motor, ahora la pregunta seria como saber cual es el principio o fin ?? Bueno mas adelante les presento una tabla donde se indica, según el tipo de norma.
Las bobinas en serie se conectan para el alto voltaje presente en la conexión, para ello se une un principio y un final de las bobinas, de esta manera se realiza la conexión en serie de bobinados de un motor, ahora la pregunta seria como saber cual es el principio o fin ?? Bueno mas adelante les presento una tabla donde se indica, según el tipo de norma. CONEXIÓN EN PARALELO
CONEXIÓN EN PARALELOLas bobinas en paralelo se conectan para el bajo voltaje presente en la conexión, en esta los principios de las bobinas van unidos, y los finales también.
Para poder indentificar los inicios y finales de bobinas es necesario la tabla que voy anexar a continuación. La lectura de esa tabla se hace de la siguiente manera; supongamos que tenemos un motor que en la bornera tiene 6 cables y estan identificados como 1,2,3,4,5,6 entonces eso significa que es un motor con 1 solo grupo de bobinas, es tipo americano, y sus inicios y finales son tal como se indican en la tabla es decir el 1 es principio de bobina, el 4 es principio de bobina, y así sucesivamente...

MOTOR DE 6 PUNTAS (IDENTIFICADAS)
Asumamos los siguientes datos de un motor:
220/440 V Δ/Y (Tomado de una placa característica cualquiera)
CONEXIÓN EN Δ
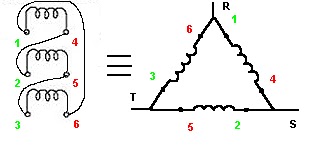
 Los esquemas anteriores serian una representación gráfica de las bobinas del motor, sin embargo en la realidad el motor posee es una bornera como la que se muestra a continuación. Esta se denomina una bornera mejorada ya que simplemente colocando las platinillas metálicas en forma vertical se estaría conectando en Δ. Nota: como estamos realizando la conexión en delta entonces la tensión de línea debe ser igual a 220 V, es decir, VRS = 220 V, VST = 220 V y VRT = 220 V ! Sabemos que en la realidad esto no es así debido a los desbalances de cargas pero los voltajes deben de parecidos, por ejemplo si tomo el tester y mido lo siguiente: VRS = 210 V, VST = 215 V y VRT = 218 V. Esta bien !
Los esquemas anteriores serian una representación gráfica de las bobinas del motor, sin embargo en la realidad el motor posee es una bornera como la que se muestra a continuación. Esta se denomina una bornera mejorada ya que simplemente colocando las platinillas metálicas en forma vertical se estaría conectando en Δ. Nota: como estamos realizando la conexión en delta entonces la tensión de línea debe ser igual a 220 V, es decir, VRS = 220 V, VST = 220 V y VRT = 220 V ! Sabemos que en la realidad esto no es así debido a los desbalances de cargas pero los voltajes deben de parecidos, por ejemplo si tomo el tester y mido lo siguiente: VRS = 210 V, VST = 215 V y VRT = 218 V. Esta bien !CONEXIÓN EN Y

 Igualmente debe de realizar un análisis de como sería el esquema anterior, pero visto en la bornera de un motor de 6 puntas. Como puede observarse en la figura anexa a continuación, ahora la disposición de las pletinas solo se encuentra uniendo los puntos 4,5,6 para formar de esa manera el neutro de la estrella. Solo quedaría alimentar entonces el motor por las puntas 1, 2 y 3 Nota: como estamos realizando la conexión en estrella entonces la tensión de línea debe ser igual a 440 V, es decir, VRS = 440V, VST = 440V y VRT = 440V !
Igualmente debe de realizar un análisis de como sería el esquema anterior, pero visto en la bornera de un motor de 6 puntas. Como puede observarse en la figura anexa a continuación, ahora la disposición de las pletinas solo se encuentra uniendo los puntos 4,5,6 para formar de esa manera el neutro de la estrella. Solo quedaría alimentar entonces el motor por las puntas 1, 2 y 3 Nota: como estamos realizando la conexión en estrella entonces la tensión de línea debe ser igual a 440 V, es decir, VRS = 440V, VST = 440V y VRT = 440V !
















{kind=link}
{kind=link}